Body text
The goal: retrieve meteoroid trajectories
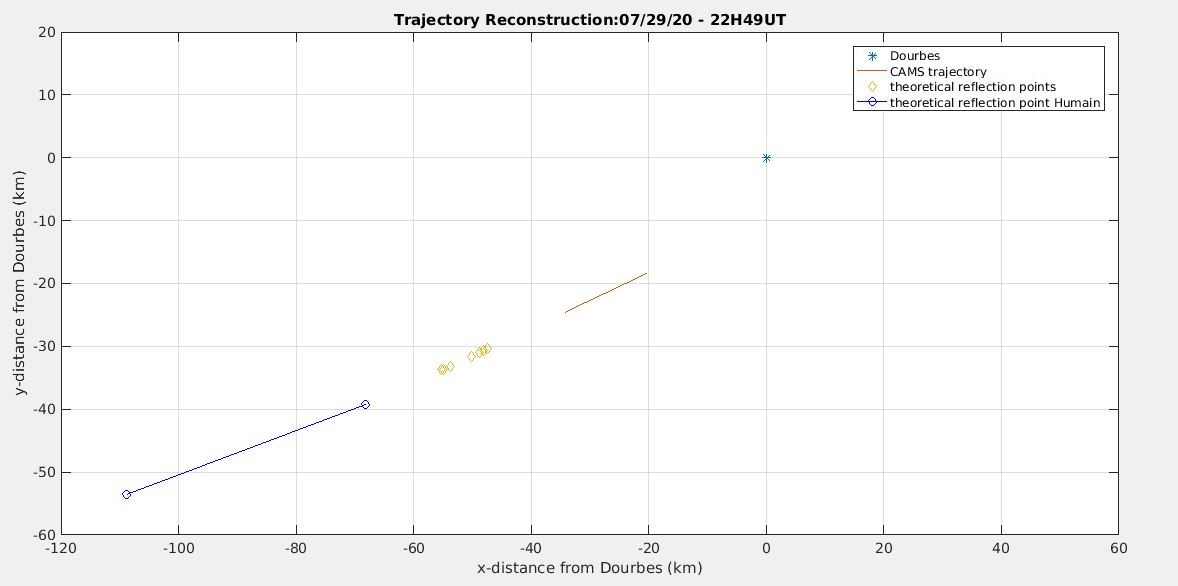
One method to retrieve meteoroid trajectories with BRAMS data is based on multiple detections of the object at various receiving stations. The method uses time delays between the start of the meteor echoes at different stations using synchronized GPS clocks. These time delays result from the fact that the radio wave received at a particular station is reflected mostly from one point of the meteor trail along the trajectory. The position of this point is different for each receiving station and, hence, the meteor echoes start at slightly different times at each station.
A minimum of six stations is mandatory for the method to work. The probability for a meteoroid to produce meteor echoes at six stations strongly increases when they are geographically close to each other (within a circle of ~ 30-40 km diameter).
The tool: a cluster of new BRAMS receiving stations
In 2020, in order to create a first cluster of stations to test the method, seven new stations were installed in Limburg (including our first station abroad in Maastricht in Netherlands), providing a total of 10 BRAMS stations. All these so-called “BRAMS receiving stations 2.0” use new material to increase the quality of BRAMS data and to ensure the long-term activities of the project:
- The original analog ICOM-R75 receivers are now replaced by digital RSP2 receivers with higher dynamic range and sensitivity. The former were used since the beginning of the project but started to fail and are no longer produced.
- A Linux-driven system run on a Raspberry Pi is used instead of Windows OS operating on a PC, allowing an easier control on the data acquisition process.
- A GPS disciplined oscillator is used to stabilize the frequency of the local oscillator of the RSP2.
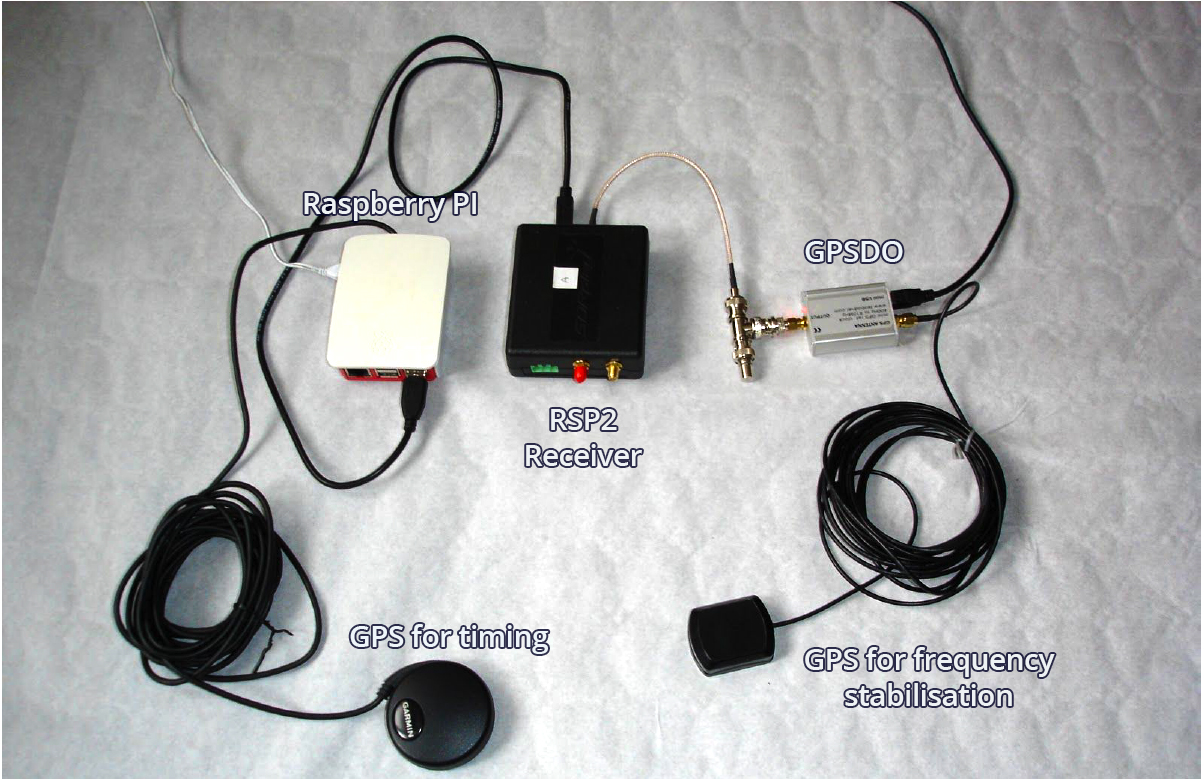
In summary, the new stations are cheaper, more compact, provide a higher sensitivity, larger dynamics and better stability in frequency.
The method: use a known trajectory provided by the CAMS-Benelux optical network
CAMS-Benelux is a network of sensitive cameras located in the Benelux. The CAMS cameras allow a very accurate determination of the trajectories and speed measurements for meteors down to magnitude +5. The network includes 4 cameras in Belgium for which BIRA-IASB is hosting and processing data daily.
For this application, trajectories from CAMS-Benelux data are used to identify meteor echoes in the data from Limburg stations. The time delays between the meteor echoes are measured and introduced in a set of non-linear equations to retrieve the trajectory and speed of the meteoroid. This solution is then compared to the trajectory and speed provided by CAMS to assess the accuracy of the method.